Elektroakustik
2002-07-10 15:33
Något lite om delningsfilter
Svante
Granqvist 1991-2002
Något lite om delningsfilter
Ett högtalarsystem har oftast fler högtalarelement än ett, eftersom det är svårt att göra ett högtalarelement som klarar att återge hela det hörbara frekvensområdet. För att varje element i ett sådant system ska återge rätt del av frekvensområdet behövs ett delningsfilter. I ett tvåvägssystem med en bashögtalare och en diskanthögtalare ska delningsfiltret se till att basen kommer till bashögtalaren och diskanten kommer till diskanthögtalaren. Signalerna som kommer ut från de två högtalarna summeras sedan akustiskt till någonting som mer eller mindre liknar orginalsignalen. Det finns dock ett flertal saker som kan gå fel på vägen.
· Vid den akustiska
summeringen av signalerna från de två högtalarna kan det bli olika löptid fram
till lyssnaren. Om högtalarnas akustiska centrum inte sitter nära varandra i
förhållande till våglängden kring delningsfrekvensen så kommer det att bli frekvensgångspåverkan
i de flesta riktningarna.
· De två
högtalarelementen ska ha rak frekvensgång. I första hand gäller det inom de
frekvensområden de är avsedda för, men det gäller även en bit utanför dessa,
eftersom delningsfiltren inte är oändligt branta.
· Summan av
överföringsfunktionerna för de två grenarna i delningsfiltret ska helst bli 1,
dvs både amplitud och fas bör lämnas opåverkade.
De två första
punkterna får oss att inse några fördelar med branta delningsfilter. Vidare kan
de spela in i designen av delningsfiltren såtillvida att man försöker
kompensera fas eller amplitudsvar för högtalarelement eller placering. De två
första punkterna kommer vi dock inte att behandla vidare här, däremot ska vi
behandla den sista lite närmare. Om vi försummar inverkan enligt de två första
punkterna och förenklar problemet till att gälla överföringsfunktionen från
insignal till summan av de två signalerna ut från delningsfiltret kan vi
studera själva filtrens påverkan. Vi ska här undersöka tre delningsfilter av 1:a,
2:a resp 3:e ordningen, för att se vilken påverkan sådana kan ha på amplitud-
och fasgång. Vi kommer att göra det på normerad form, den som så önskar kan
ersätta s med s/s0.
1:a ordningens delningsfilter
Lågpassgrenen i
ett första ordningens delningsfilter har en pol på reella axeln i s‑planet
(ekv. 1). Högpassgrenen har en pol på samma ställe, och dessutom ett nollställe
i origo (ekv. 2).
![]() (1)
(1) ![]() (2)
(2)
Överföringsfunktionerna
kan antingen adderas (om högtalarelementen fasas lika) eller subtraheras (om
den ena högtalaren fasvänds). Detta ger två typfall.
![]() (3)
(3) ![]() (4)
(4)
Adderade signaler (ekv. 3), överföringsfunktionen får en pol och ett nollställe på samma ställe reella axeln som alltså tar ut varandra. Alltså ingen påverkan av signalen.
Subtraherade
signaler (ekv. 4), överföringsfunktionen får en pol på samma ställe som de båda
grenarna i filtret och ett nollställe speglat i imaginära axeln. Detta filter
har inga fördelar jämfört med det första filtret, men är av principiellt
intressant eftersom det är av allpasskaraktär, dvs det har ingen påverkan på
amplitudsvaret, men fasinformationen blir förvrängd.
Ytterligare en
observation vi kan göra är att fasskillnaden mellan två grenarna alltid är 90°, vid alla frekvenser. Vid delningsfrekvensen, när signalerna är
lika starka ska amplituden på överföringsfunktionerna därför vara ![]() eller –3 dB för
att summaamplituden av dem ska bli 1. Så är också fallet.
eller –3 dB för
att summaamplituden av dem ska bli 1. Så är också fallet.
2:a ordningens delningsfilter
Lågpassgrenen i
ett andra ordingens delningsfilter har två poler på reella axeln i s‑planet
(ekv. 5). Högpassgrenen har också två poler på samma ställe och dessutom två
nollställen i origo (ekv. 6).
![]() (5)
(5) ![]() (6)
(6)
På samma sätt som
med först ordningens filter kan överföringsfunktionerna antingen adderas (om
högtalarelementen fasas lika) eller subtraheras (om den ena högtalaren
fasvänds). Detta ger två typfall.
![]() (7)
(7) ![]() (8)
(8)
Adderade signaler
(ekv. 7), överföringsfunktionen får två poler på reella axeln på samma ställe
som grenarna i filtret och två poler på imaginära axeln. Detta filter kan inte
rekommenderas eftersom det ger en "dip" i amplitudsvaret vid
delningsfrekvensen.
Subtraherade
signaler(ekv. 8), överföringsfunktionen får två poler på samma ställe som de
båda grenarna i filtret, varav en tas ut av ett nollställe. Dessutom får man
ett nollställe på positiva reella axeln speglat i imaginära axeln. Kvar blir
samma typ av allpassfilter som var möjligt med 1:a ordningens filter. Inget av
dessa två fall gav bibehållen fasinformation, men den ena (ekv. 8) gav rakt
amplitudsvar pga allpasskaraktären.
Man kan notera
att fasskillnaden mellan filtergrenarna 0° i fallet när ena högtalaren fasvänds, vid
alla frekvenser. Av denna anledning skall amplituden på
överföringsfunktionerna vara 1/2, eller –6 dB vid delningfrekvensen. Man
bör alltså inte använda butterworthdimensionering för andra ordningens
delningsfilter, eftersom sådana dämpar –3 dB vid delningsfrekvensen. Detta
skulle ge en amplitudökning kring delningsfrekvensen.
3:e ordningens delningsfilter
Lågpassgrenen i
ett tredje ordingens delningsfilter är av butterworthtyp och har en pol på
reella axeln och ett polpar på enhetscirkeln ute i s‑planet (ekv. 9).
Högpassgrenen har samma poler som lågpassgrenen och dessutom tre nollställen i
origo (ekv. 10).
![]() (9)
(9) ![]() (10)
(10)
Även nu kan
överföringsfunktionerna antingen adderas (om högtalarelementen fasas lika)
eller subtraheras (om den ena högtalaren fasvänds). De två typfallen blir:
![]() (11)
(11) ![]() (12)
(12)
Adderade signaler
(ekv. 11), överföringsfunktionen får tre poler på samma ställe som grenarna i
filtret men den på reella axeln tas ut av ett nollställe. Kvar blir två poler
ute i det komplexa planet och två
nollställen speglade i imaginära axeln. Totalt alltså en allpasskaraktär men av
annan typ än tidigare.
Subtraherade
signaler (ekv. 12), överföringsfunktionen får tre poler på samma ställe som de
båda grenarna i filtret, varav de två ute i komplexa planet tas ut av
nollställen. Polen på reella axeln finns kvar och likaså ett nollställe speglat
i imaginära axeln, dvs det blir samma allpasskaraktär som för 1:a och 2:a
ordningens filter.
I detta fall är
fasskillnaden mellan de två grenarna alltid 270°, vid alla frekvenser. Vid
delningsfrekvensen, när signalerna är lika starka ska amplituden på
överföringsfunktionerna därför vara ![]() eller –3 dB för
att summaamplituden av dem ska bli 1. Så är också fallet eftersom filtren är
butterworthdimensionerade.
eller –3 dB för
att summaamplituden av dem ska bli 1. Så är också fallet eftersom filtren är
butterworthdimensionerade.
n:te ordningens delningsfilter
Vi kan
generalisera ovanstående resonemang till att gälla fler delningsfilter:
![]() (13)
(13) ![]() (14)
(14)
Vi behåller i och
med detta begränsningarna att Pn(s) är lika i de båda grenarna, och
att brantheten i spärrbandet för de båda filtergrenarna är densamma. Under
dessa förutsättningarna blir summa-, resp skillnadssignalerna
![]() (15)
(15) ![]() (16)
(16)
Polynomen i
täljarna på ekv. 15 och 16 har nollställen som är ”jämnt utspridda” över
enhetscirkeln. För att undvika fas- och amplitudpåverkan, måste dessa
nollställen tas ut av motsvarande poler via Pn(s). Eftersom
åtminstone ett nollställe hamnar i höger halvplan eller på jw-axeln för n³2, kan dessa nollställen inte elimineras med
motsvarande poler om filtren ska vara stabila. Däremot kan man spegla dem i jw‑axeln och då blir amplitudsvaret blir rakt, medan fasen fortfarande
påverkas. Resultatet blir en allpassfilterfunktion. Pn(s) ska vara
ett butterworthpolynom, Bn(s) för udda n och ett kvadratiskt
butterworth för jämna n, dvs Pn(s)=[Bn/2(s)]2
(Sådana polynom kallas ibland
Linkwitz-Riley eller bara Linkwitz). Eftersom fasskillnaden mellan utsignalerna
från de olika grenarna blir n×90° (vid alla frekvenser, men speciellt vid
delningsfrekvensen) gäller att:
· För udda n kan
ena högtalaren polvändas utan att amplitudsvaret ändras
· För n=2,6,10,14… ska
ena högtalaren polvändas
· För n=4,8,12,16… ska
högtalarna fasas lika.
Allpassfilter?
Vi har sett att
både 1:a, 2:a och 3:e ordningens delningsfilter kan uppföra sig som samma typ
av allpassfilter med en reell pol och ett reellt nollställe speglat i den
imaginära axeln (ekv. 4,8 och 12). Däremot var det bara 1:a ordningens filter
som kunde lämna fasen opåverkad (ekv. 3). Ett allpassfilter har amplitudsvaret
1, men olinjär fasgång, fig 1. En effekt av detta är att fyrkanvågssvaret från
ett allpassfilter är väldigt olikt en fyrkantvåg, fig 2. Eftersom vi såg i
inledningen att det finns fördelar med branta filter är det intressant att
utreda om ett sådant allpassfilter har någon hörbar påverkan på ljud. I
elektroakustiklaborationen ”lyssningstest” lyssnar vi bla på ett sådant.
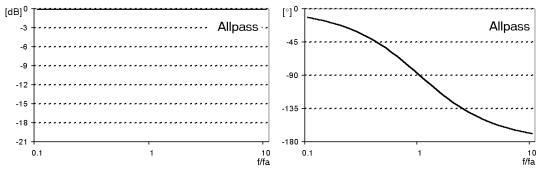
Fig 1. Amplitud-
och fassvar för allpassfilter (ekv. 4, 8 och 12).
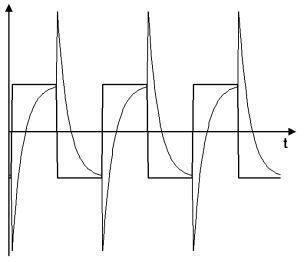
Fig 2. Fyrkantssvar för allpassfilter (ekv. 4, 8
och 12).
Andra dimensioneringar
I verkliga
dimensioneringar ser man ofta olika ordningstal i högpass- och lågpassgrenarna.
Sådana dimensioneringar ger nästan alltid en liten påverkan på frekvens- och
fasgången. Påverkan är dock ofta mindre än andra effekter i högtalarsystemet
och ibland kan man till och med dra nytta av den för att kompensera något
annat. Även om påverkan för det mesta är hörbar, kan den vara liten jämfört med
andra fördelar som erhålls. För den praktiska konstruktionen kan det alltså
vara bättre att göra avsteg från teorin ovan, men förståelsen för resonemangen
är ändå nyttiga att ha med sig när man gör den slutgiltiga dimensioneringen av
delningsfiltret.
Vidare har vi
endast behandlat tvåvägssystem, men teorin kan lätt utvidgas till att gälla
flervägssystem genom att applicera fler filter.
Vi har heller
inte tittat på möjligheten att göra digitala delningsfilter. Detta är en hel
vetenskap i sig och här finns en hel mängd nya gropar att falla i.